Uso de materiales “inteligentes” en las prótesis
| Principio de funcionamiento de la mano con alambres musculares |
Hoy en día, el término “inteligente” se ha adoptado como un modo válido de calificar y describir una clase de materiales que presentan la capacidad de cambiar sus propiedades físicas (rigidez, viscosidad, forma, color, etc.) en presencia de un estímulo concreto.
Para controlar la respuesta de una forma predeterminada presentan mecanismos de control y selección de la respuesta. El tiempo de respuesta es corto. El sistema comienza a regresar a su estado original tan pronto como el estímulo cesa.
| MATERIALES "INTELIGENTES" |
| Materiales con memoria de forma |
| Aleaciones con memoria de forma |
| Polímeros con memoria de forma |
| Cerámicas con memoria de forma |
| Aleaciones con memoria de forma, ferromagnéticas |
| Materiales electro y magnetoactivos |
| Materiales electro y magnetoreológicos |
| Materiales piezoeléctricos |
| Materiales electro y magnetorestrictivos |
| Materiales foto y cromoactivos |
| Fotoactivos |
|
|
|
| Cromoactivos |
|
|
|
Dentro de las aleaciones con memoria de forma (SMA), se encuentran los llamados alambres musculares, estos son alambres delgados de alta resistencia mecánica, construidos con una aleación de Níquel y Titanio llamada comercialmente “Nitinol”.
La adecuada selección de los actuadores durante el diseño de una prótesis, es una parte esencial para el éxito de ésta. Por tal motivo después de un análisis de las especificaciones de diseño requeridas en una prótesis de miembro superior, se observó que los alambres musculares podrían satisfacer las necesidades de los actuadores.
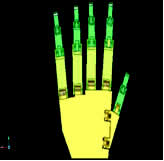
Se realizó un modelo funcional exclusivamente de la mano, dicha mano fue diseñada tomando como base las medidas de la mano derecha de un hombre adulto, mexicano de estatura promedio. El material utilizado para su fabricación fue Nylamid Autolubricado, debido a su baja densidad, alta resistencia y buena maquinabilidad que éste posee. El modelo consta de dieciséis piezas en total: la palma de la mano y cinco dedos. Los dedos Índice, medio, anular y meñique se componen de tres piezas (falange proximal, medial y distal), las cuales se encuentran unidas a la palma y entre sí por medio de articulaciones rotacionales. El dedo pulgar consta también de tres eslabones: dos falanges (proximal y distal) y una pieza que realizará la función del primer metacarpiano (hueso de la palma de la mano), esto permitirá realizar la acción oponente de este dedo. Por simplicidad de diseño, se decidió sustituir los demás metacarpianos por una sola pieza: la palma. La mano se encuentra normalmente abierta mediante resortes de compresión. En la figura 10 se muestran los huesos y articulaciones de la mano, en la figura 11 el modelado en CAD para el modelo de pruebas propuesto, y en la figura 12 el modelo funcional en el que se realizaron las pruebas.
 |
 |
 |
Figura
10. Huesos y articulaciones |
Figura
11. Modelo CAD |
Figura 12.Modelo funcional |
| Principio de funcionamiento de la mano con alambres musculares |